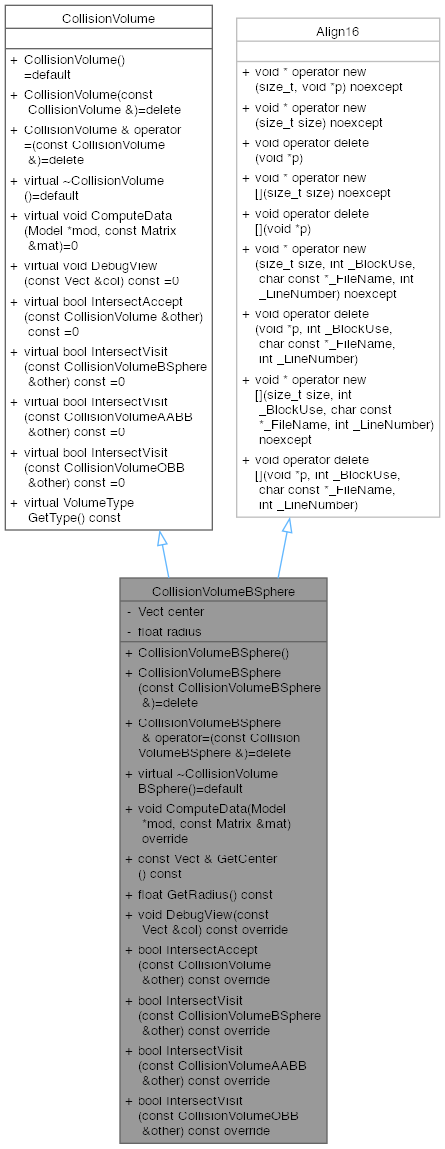
Represents a bounding sphere collision volume.
More...
#include <CollisionVolumeBSphere.h>
|
|
| CollisionVolumeBSphere (const CollisionVolumeBSphere &)=delete |
| |
|
CollisionVolumeBSphere & | operator= (const CollisionVolumeBSphere &)=delete |
| |
| void | ComputeData (Model *mod, const Matrix &mat) override |
| | Computes the collision data for the bounding sphere.
|
| |
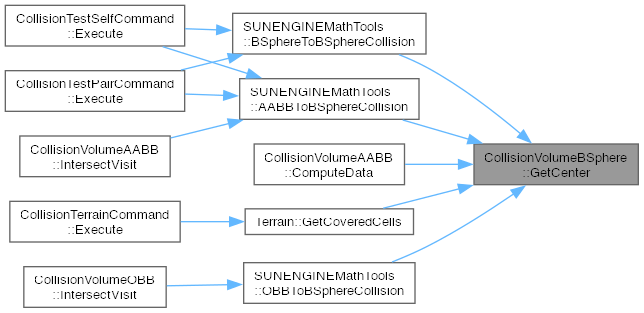
| const Vect & | GetCenter () const |
| | Gets the center of the bounding sphere.
|
| |
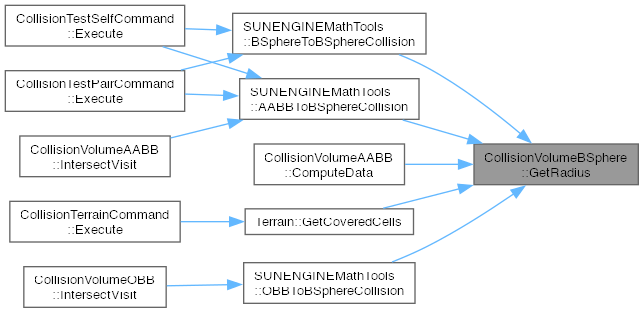
| float | GetRadius () const |
| | Gets the radius of the bounding sphere.
|
| |
| void | DebugView (const Vect &col) const override |
| |
| bool | IntersectAccept (const CollisionVolume &other) const override |
| |
| bool | IntersectVisit (const CollisionVolumeBSphere &other) const override |
| |
| bool | IntersectVisit (const CollisionVolumeAABB &other) const override |
| |
| bool | IntersectVisit (const CollisionVolumeOBB &other) const override |
| |
|
| CollisionVolume (const CollisionVolume &)=delete |
| |
|
CollisionVolume & | operator= (const CollisionVolume &)=delete |
| |
| virtual VolumeType | GetType () const |
| |
|
void * | operator new (size_t, void *p) noexcept |
| |
|
void * | operator new (size_t size) noexcept |
| |
|
void | operator delete (void *p) |
| |
|
void * | operator new[] (size_t size) noexcept |
| |
|
void | operator delete[] (void *p) |
| |
|
void * | operator new (size_t size, int _BlockUse, char const *_FileName, int _LineNumber) noexcept |
| |
|
void | operator delete (void *p, int _BlockUse, char const *_FileName, int _LineNumber) |
| |
|
void * | operator new[] (size_t size, int _BlockUse, char const *_FileName, int _LineNumber) noexcept |
| |
|
void | operator delete[] (void *p, int _BlockUse, char const *_FileName, int _LineNumber) |
| |
|
|
Vect | center |
| | The center of the bounding sphere.
|
| |
|
float | radius |
| | The radius of the bounding sphere.
|
| |
Represents a bounding sphere collision volume.
The CollisionVolumeBSphere class represents a bounding sphere collision volume. It provides methods to compute collision data, get the center and radius, and check intersections with other volumes.
◆ ComputeData()
| void CollisionVolumeBSphere::ComputeData |
( |
Model * | mod, |
|
|
const Matrix & | mat ) |
|
overridevirtual |
Computes the collision data for the bounding sphere.
- Parameters
-
| mod | Pointer to the model. |
| mat | The transformation matrix. |
Implements CollisionVolume.
◆ DebugView()
| void CollisionVolumeBSphere::DebugView |
( |
const Vect & | col | ) |
const |
|
overridevirtual |
◆ GetCenter()
| const Vect & CollisionVolumeBSphere::GetCenter |
( |
| ) |
const |
Gets the center of the bounding sphere.
- Returns
- The center of the bounding sphere.
◆ GetRadius()
| float CollisionVolumeBSphere::GetRadius |
( |
| ) |
const |
Gets the radius of the bounding sphere.
- Returns
- The radius of the bounding sphere.
◆ IntersectAccept()
| bool CollisionVolumeBSphere::IntersectAccept |
( |
const CollisionVolume & | other | ) |
const |
|
overridevirtual |
◆ IntersectVisit() [1/3]
◆ IntersectVisit() [2/3]
◆ IntersectVisit() [3/3]
The documentation for this class was generated from the following files:

 Public Member Functions inherited from CollisionVolume
Public Member Functions inherited from CollisionVolume