|
|
| CollisionVolumeAABB (const CollisionVolumeAABB &) |
| |
|
CollisionVolumeAABB & | operator= (const CollisionVolumeAABB &) |
| |
| void | ComputeData (Model *mod, const Matrix &mat) override |
| | Computes the collision data for the AABB from a model and transformation matrix.
|
| |
| void | ComputeData (const CollisionVolumeBSphere &bsphere) |
| | Computes the AABB from a bounding sphere.
|
| |
| void | ComputeDataFromMinMax (const Vect &min, const Vect &max) |
| | Sets the AABB from explicit min and max points.
|
| |
| void | Enclose (const CollisionVolumeAABB &other) |
| | Expands this AABB to enclose another AABB.
|
| |
| const Vect & | GetMin () const |
| | Gets the minimum point of the AABB.
|
| |
| const Vect & | GetMax () const |
| | Gets the maximum point of the AABB.
|
| |
| Model * | GetModel () const |
| | Gets the model associated with this AABB.
|
| |
| void | DebugView (const Vect &col) const override |
| | Visualizes the AABB for debugging purposes.
|
| |
| bool | IntersectAccept (const CollisionVolume &other) const override |
| | Accepts a collision test with another collision volume (double dispatch).
|
| |
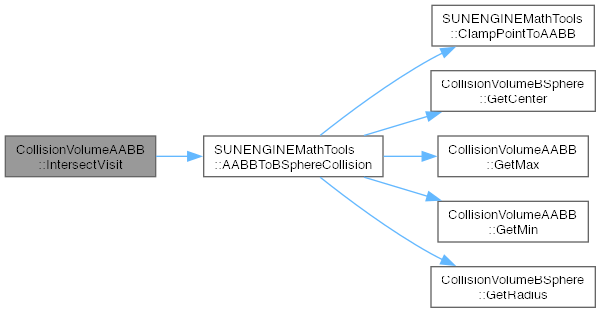
| bool | IntersectVisit (const CollisionVolumeBSphere &other) const override |
| | Tests intersection with a bounding sphere.
|
| |
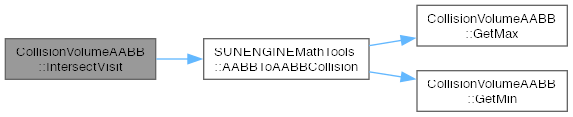
| bool | IntersectVisit (const CollisionVolumeAABB &other) const override |
| | Tests intersection with another AABB.
|
| |
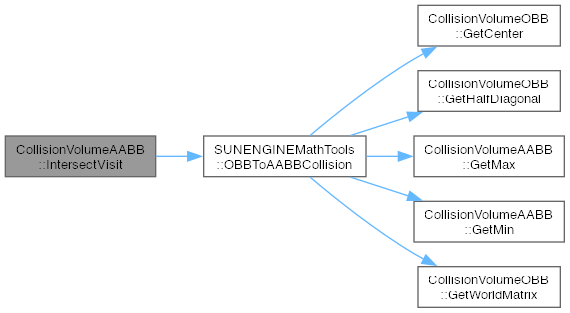
| bool | IntersectVisit (const CollisionVolumeOBB &other) const override |
| | Tests intersection with an oriented bounding box (OBB).
|
| |
| VolumeType | GetType () const override |
| | Gets the type of this collision volume.
|
| |
|
| CollisionVolume (const CollisionVolume &)=delete |
| |
|
CollisionVolume & | operator= (const CollisionVolume &)=delete |
| |
|
void * | operator new (size_t, void *p) noexcept |
| |
|
void * | operator new (size_t size) noexcept |
| |
|
void | operator delete (void *p) |
| |
|
void * | operator new[] (size_t size) noexcept |
| |
|
void | operator delete[] (void *p) |
| |
|
void * | operator new (size_t size, int _BlockUse, char const *_FileName, int _LineNumber) noexcept |
| |
|
void | operator delete (void *p, int _BlockUse, char const *_FileName, int _LineNumber) |
| |
|
void * | operator new[] (size_t size, int _BlockUse, char const *_FileName, int _LineNumber) noexcept |
| |
|
void | operator delete[] (void *p, int _BlockUse, char const *_FileName, int _LineNumber) |
| |
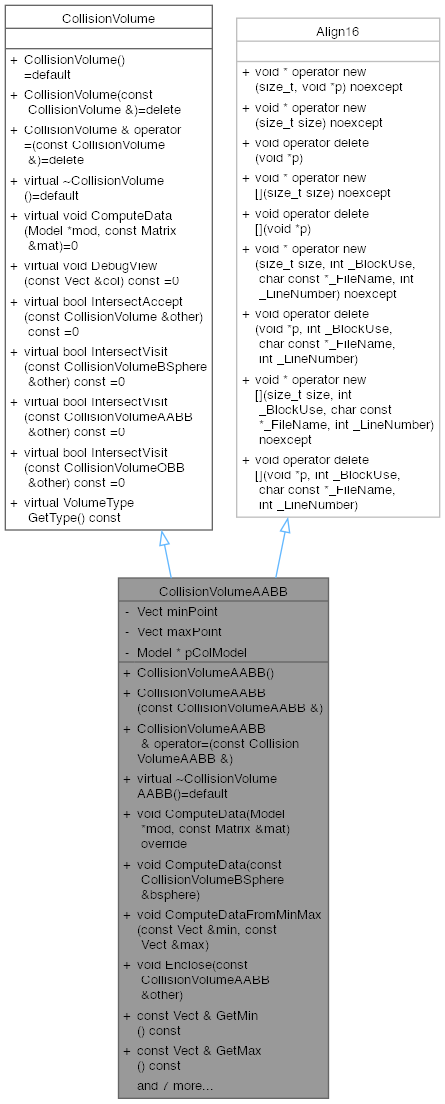
Represents an axis-aligned bounding box (AABB) collision volume.
The CollisionVolumeAABB class implements an axis-aligned bounding box for collision detection. An AABB is a rectangular box aligned with the world axes, defined by its minimum and maximum corner points. This class provides methods to compute the AABB from a model and transformation matrix, retrieve its properties, and perform intersection tests with other collision volumes.
Typical usage involves calling ComputeData() to initialize the AABB from a model and world matrix, then using intersection methods for collision queries.
- See also
- CollisionVolume, CollisionVolumeOBB, CollisionVolumeBSphere, SUNENGINEMathTools

 Public Member Functions inherited from CollisionVolume
Public Member Functions inherited from CollisionVolume